


















2020년 장어·오징어 로봇이 '외계 바다' 생명체 탐사 나선다
페이지 정보
작성자 실장 작성일15-05-15 11:46 조회4,065회 댓글0건본문
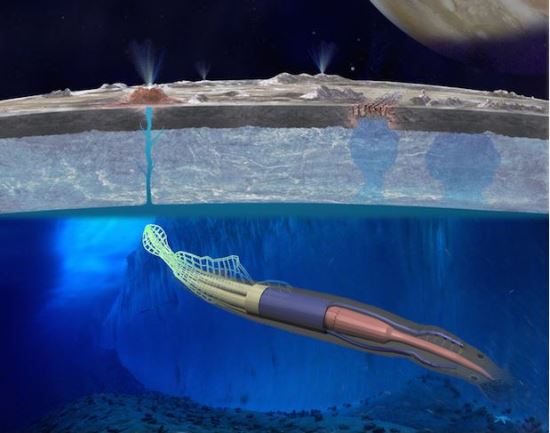
NASA와 코넬대가 공동 개발 중인 유로파 바다 탐사용 '오징어 로봇' 개념도. NASA, 코넬대 제공
‘유로파’는 목성의 4대 위성 중 하나입니다. 1610년 우리에 잘 알려진 갈릴레이 갈릴레오가 발견했죠.
위성 표면을 두꺼운 얼음이 덮고 있는데, 내부에 깊이가 160㎞인 거대 바다가 존재하는 것으로 추정되고 있습니다. 지구에서 가장 깊은 바다인 마리아나 해구 수심이 11㎞에 불과한 데 비하면 엄청난 규모죠.
때문에 과학자들은 태양계에서 생명체가 있을 가능성이 가장 큰 곳이 유로파라고 추정해 왔습니다. 미국항공우주국(NASA)도 홈페이지를 통해 “목성 위성들은 지구 외에 생명체가 존재할 가능성이 높다”며 지난 15년간 목성을 연구해 왔다고 밝혔습니다.
유럽우주국(ESA)도 2020년 유로파 탐사선 ‘주스(Juice)’를 발사하는 등 향후 유로파 탐사 경쟁은 더욱 치열해 질 전망입니다.
유로파의 얼음 표면 밑 바다 속에 생명체가 존재할 가능성을 확인하려면 어떻게 해야 할까요.
바다까지 들어가기 위해 우선 두꺼운 얼음 표면을 뚫어야 합니다. 유로파의 얼음 지각 두께는 최소 50㎞에 달하는 것으로 추정되고 있습니다.
NASA가 최근 이를 해결할 로봇 탐사선으로 ‘장어 로봇(eel robot)’ ‘오징어 로봇(squid robot)’ 개발에 착수해 흥미를 끌고 있습니다. 얼음 표면을 뚫고 거대한 바다까지 이어지는 길을 뚫는 일종의 ‘배관 로봇’(plumbing robot)인 셈입니다.
13일(현지시간) CBS 등 미국 방송 보도에 따르면 NASA는 미국 코넬대 연구팀과 공동으로 유로파 얼음 지표 아래 미지의 바다를 탐사하기 위해 오징어 혹은 장어 형상의 ‘자율 로봇’ 개발에 착수했습니다.
NASA는 이를 위해 코넬대에 10만달러의 연구 기금을 승인했습니다. 이는 NASA가 진행한 ‘민간연구기관의 혁신적이고 창의적 아이디어를 제안받아 채택하는 프로그램(NIAC) 2015’에 선정된 15개 중 유망한 아이디어입니다.
자율 로봇은 배터리에 지구에서 보낸 연료나 태양광을 이용하지 않고 자체적으로 에너지를 생산, 이용하는 로봇을 말합니다. 유로파의 경우 달과 화성보다 거리가 멀고 얼음과 바다 속 탐사를 하려면 태양광을 이용하기 힘들다는 한계가 있습니다.
코넬대 연구팀은 이런 문제를 극복하기 위해 전기역학적인 ‘촉수’를 장착하고 유연한 몸체를 가진 오징어나 장어 로봇을 대안으로 제시했습니다.
이 로봇은 오징어처럼 물 속을 헤엄칠 수 있으며 센서를 갖춘 촉수로 유로파를 관통하는 목성의 강한 자기장을 끌어들여 물을 수소와 산소로 전기 분해하면서 자체적으로 에너지원을 생성, 몸체가 헤엄쳐서 앞으로 나아가도록 하는 원리입니다. 로봇은 또 ‘발광 피부’를 장착해 주변 촬영을 위한 플래시처럼 활용됩니다.
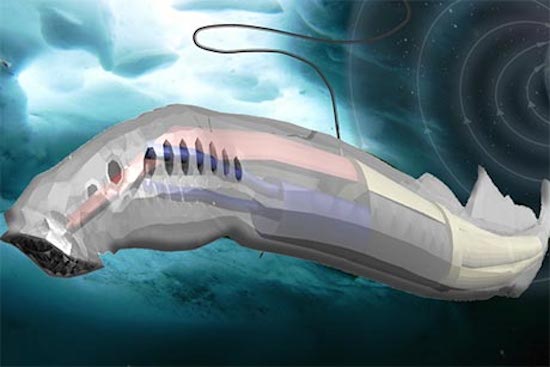
NASA와 코넬대가 공동 개발 중인 '장어 로봇' 개념도
수석 연구원인 메이슨 펙 코넬대 기계항공우주학과 교수는 “유로파의 바다 같은 환경에서 생물들이 생명을 유지하기 위해 어떻게 에너지를 만드는 지 이해하도록 도와 줄 것”이라고 말했습니다.
펙 교수는 또 “장어 로봇이 유로파 같은 외계 바다를 탐험할 새로운 가능성을 제시해 줄 것”이라고 덧붙습니다.
NASA는 지난해 유로파 탐사 미션을 발표하고 1500만 달러 투입을 결정했습니다. 아직 구체적인 일정이 정해지진 않았지만 본격 탐사는 2020년 중반 쯤에 착수될 전망입니다.
위성 표면을 두꺼운 얼음이 덮고 있는데, 내부에 깊이가 160㎞인 거대 바다가 존재하는 것으로 추정되고 있습니다. 지구에서 가장 깊은 바다인 마리아나 해구 수심이 11㎞에 불과한 데 비하면 엄청난 규모죠.
때문에 과학자들은 태양계에서 생명체가 있을 가능성이 가장 큰 곳이 유로파라고 추정해 왔습니다. 미국항공우주국(NASA)도 홈페이지를 통해 “목성 위성들은 지구 외에 생명체가 존재할 가능성이 높다”며 지난 15년간 목성을 연구해 왔다고 밝혔습니다.
유럽우주국(ESA)도 2020년 유로파 탐사선 ‘주스(Juice)’를 발사하는 등 향후 유로파 탐사 경쟁은 더욱 치열해 질 전망입니다.
유로파의 얼음 표면 밑 바다 속에 생명체가 존재할 가능성을 확인하려면 어떻게 해야 할까요.
바다까지 들어가기 위해 우선 두꺼운 얼음 표면을 뚫어야 합니다. 유로파의 얼음 지각 두께는 최소 50㎞에 달하는 것으로 추정되고 있습니다.
NASA가 최근 이를 해결할 로봇 탐사선으로 ‘장어 로봇(eel robot)’ ‘오징어 로봇(squid robot)’ 개발에 착수해 흥미를 끌고 있습니다. 얼음 표면을 뚫고 거대한 바다까지 이어지는 길을 뚫는 일종의 ‘배관 로봇’(plumbing robot)인 셈입니다.
13일(현지시간) CBS 등 미국 방송 보도에 따르면 NASA는 미국 코넬대 연구팀과 공동으로 유로파 얼음 지표 아래 미지의 바다를 탐사하기 위해 오징어 혹은 장어 형상의 ‘자율 로봇’ 개발에 착수했습니다.
NASA는 이를 위해 코넬대에 10만달러의 연구 기금을 승인했습니다. 이는 NASA가 진행한 ‘민간연구기관의 혁신적이고 창의적 아이디어를 제안받아 채택하는 프로그램(NIAC) 2015’에 선정된 15개 중 유망한 아이디어입니다.
자율 로봇은 배터리에 지구에서 보낸 연료나 태양광을 이용하지 않고 자체적으로 에너지를 생산, 이용하는 로봇을 말합니다. 유로파의 경우 달과 화성보다 거리가 멀고 얼음과 바다 속 탐사를 하려면 태양광을 이용하기 힘들다는 한계가 있습니다.
코넬대 연구팀은 이런 문제를 극복하기 위해 전기역학적인 ‘촉수’를 장착하고 유연한 몸체를 가진 오징어나 장어 로봇을 대안으로 제시했습니다.
이 로봇은 오징어처럼 물 속을 헤엄칠 수 있으며 센서를 갖춘 촉수로 유로파를 관통하는 목성의 강한 자기장을 끌어들여 물을 수소와 산소로 전기 분해하면서 자체적으로 에너지원을 생성, 몸체가 헤엄쳐서 앞으로 나아가도록 하는 원리입니다. 로봇은 또 ‘발광 피부’를 장착해 주변 촬영을 위한 플래시처럼 활용됩니다.
NASA와 코넬대가 공동 개발 중인 '장어 로봇' 개념도
수석 연구원인 메이슨 펙 코넬대 기계항공우주학과 교수는 “유로파의 바다 같은 환경에서 생물들이 생명을 유지하기 위해 어떻게 에너지를 만드는 지 이해하도록 도와 줄 것”이라고 말했습니다.
펙 교수는 또 “장어 로봇이 유로파 같은 외계 바다를 탐험할 새로운 가능성을 제시해 줄 것”이라고 덧붙습니다.
NASA는 지난해 유로파 탐사 미션을 발표하고 1500만 달러 투입을 결정했습니다. 아직 구체적인 일정이 정해지진 않았지만 본격 탐사는 2020년 중반 쯤에 착수될 전망입니다.
댓글목록
등록된 댓글이 없습니다.




